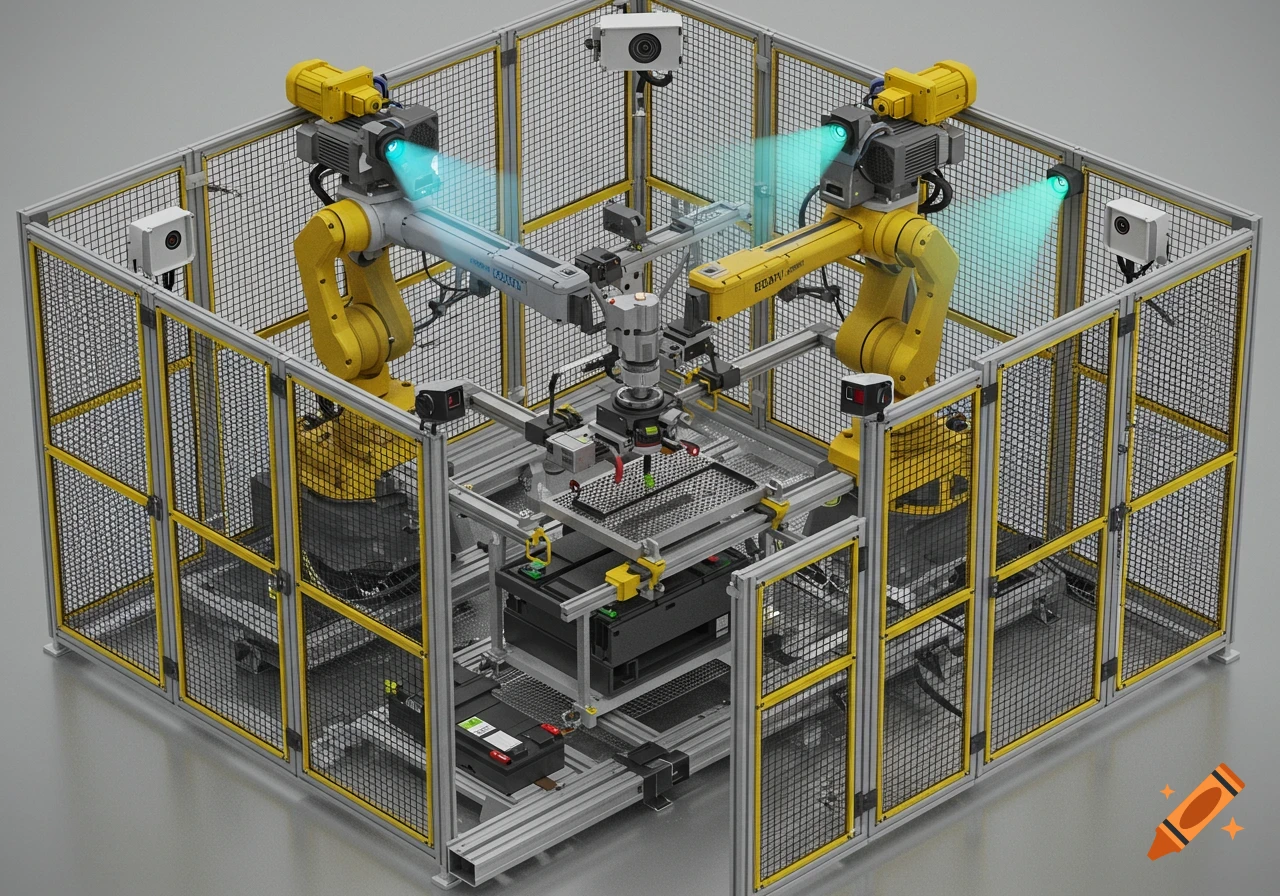
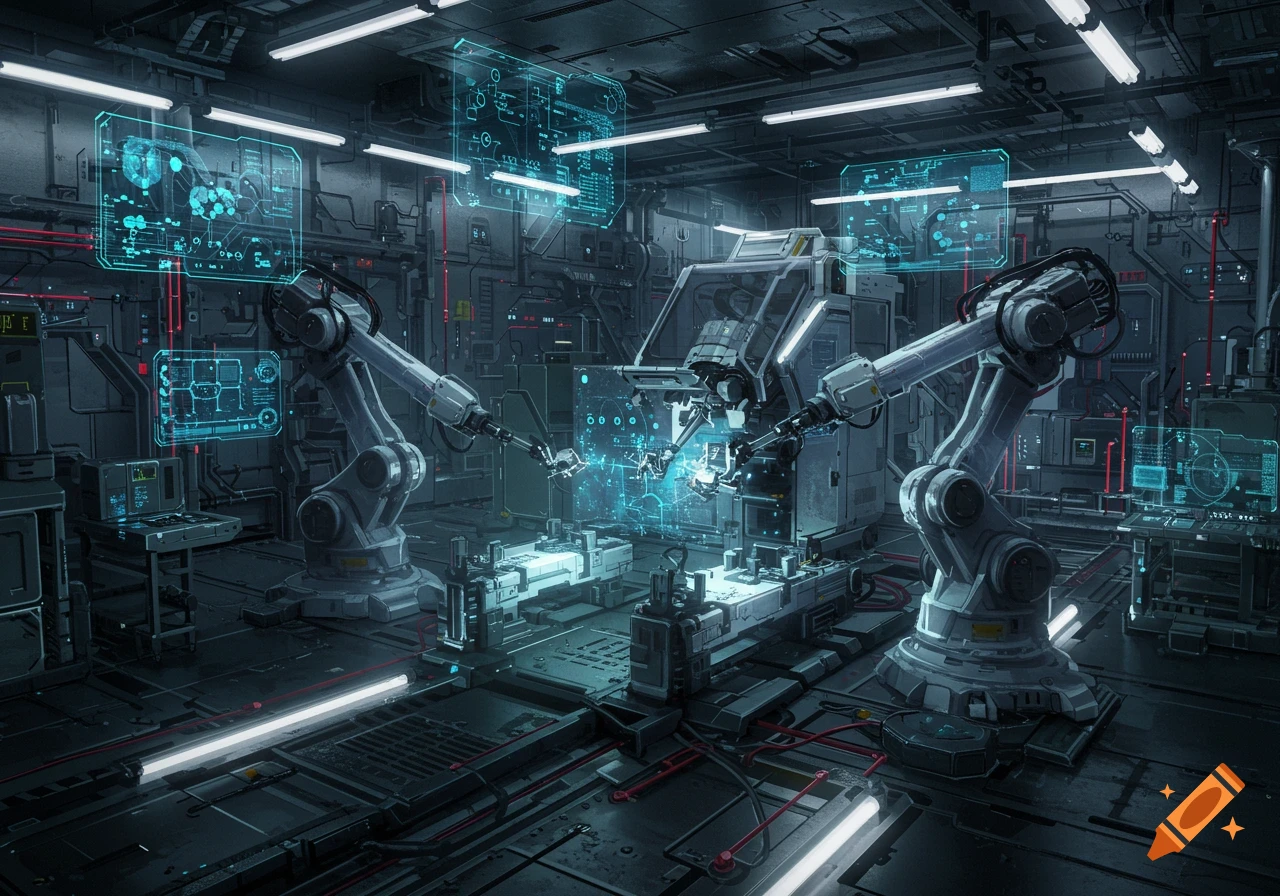
An overhead view of a white robotic arm inside a fenced industrial cell, working on a part on a trolley pulled by a Kivnon AGV.

erstelle mir ein Bild für eine automatisierte abgeschlossene Roboterzelle zum Verschrauben als Draufsicht, inkl. Sicherheitszaun Maße der Roboterzelle ca. 2,5xx2,5m ausgestattet mit 1x Roboter 6-Achs Knickarm, mittlere Größe in weiß, Der Roboter steht erhöht auf einem Sockel, ca. 1000mm hoch mit 1x End of Arm Tooling mit 1x QST-Schraubspindel von Atlas Copco, 1x 3D Vision Sensor von Keyence direkt am EOAT angeschlossen, 1x Schraubenzuführung Stufenförderer Weber ZEL240 für QST-Schraubspindel die Schraubenzuführung ist mittels eines Schlauches mit der QST-Schraubspindelm am EOAT am Roberter verbunden, die Schlauchführung erfolgt entlang des Roboters bis zum EOAT Der Werkstückträger ist auf einem Trolley befestigt, das AGV ist direkt unter dem Trolley positioniert und zieht den Trolley Der Werkstückträger nimmt ein Cockpitmodul auf Das AGV durchfährt die Roboterzelle in einem Abstand von ca. 250-450mm quer zum Robotersockel in Fahrtrichtung, sodass der Roboter den Werkstückträger im Arbeitsprozess erreichen kann Die Roboterzelle wird durch AGV befahren, auf dem AGV ist ein Werkstückträger zur Bearbeitung durch den Roboter angebracht, die vor dem Roboter in Arbeitsstellung verbleiben, rechts und links jeweils Lichtvorhänge mit Muting-Funktion, die AGV verfahren von rechts nach links durch die Roboterzelle Abstand des Robotersockels zum AGV mit Werkstückträger ca. 0,25m AGV vom Hersteller Kivnon Typ K10 ausgestattet mit 1x Messdose für Inline MFU QST-Schraubspindel von SCS Die See more
More images like this