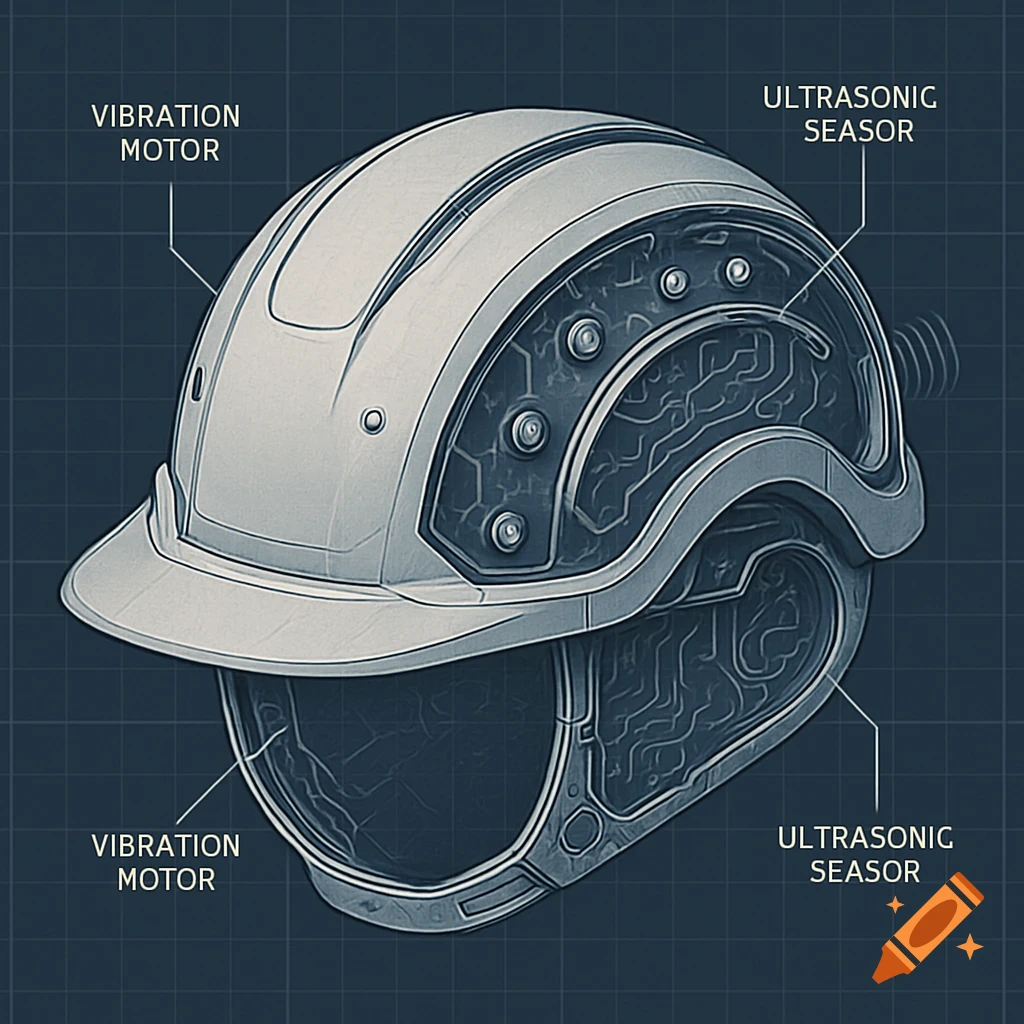
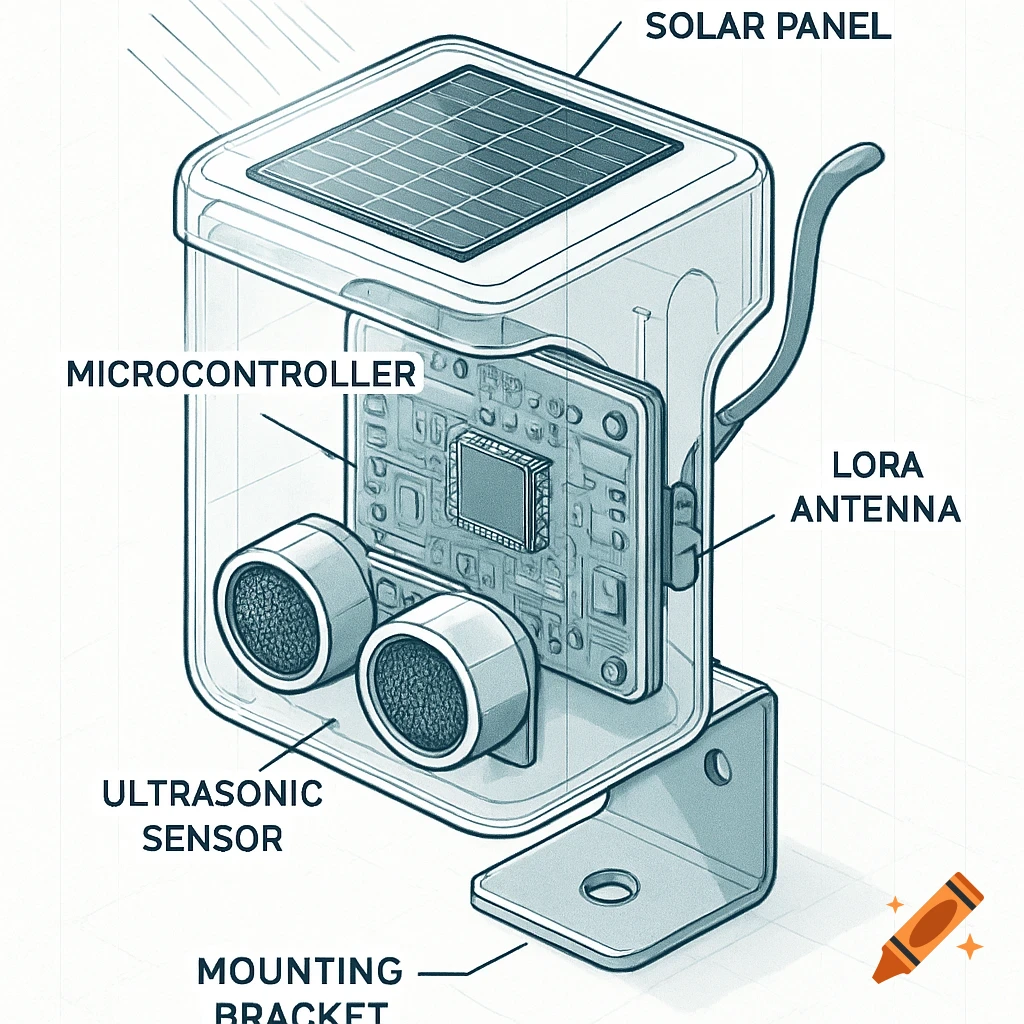
A black smart baseball cap with white labels indicating GPS, AI camera, LiDAR, ultrasonic sensors, and microcomputer components.

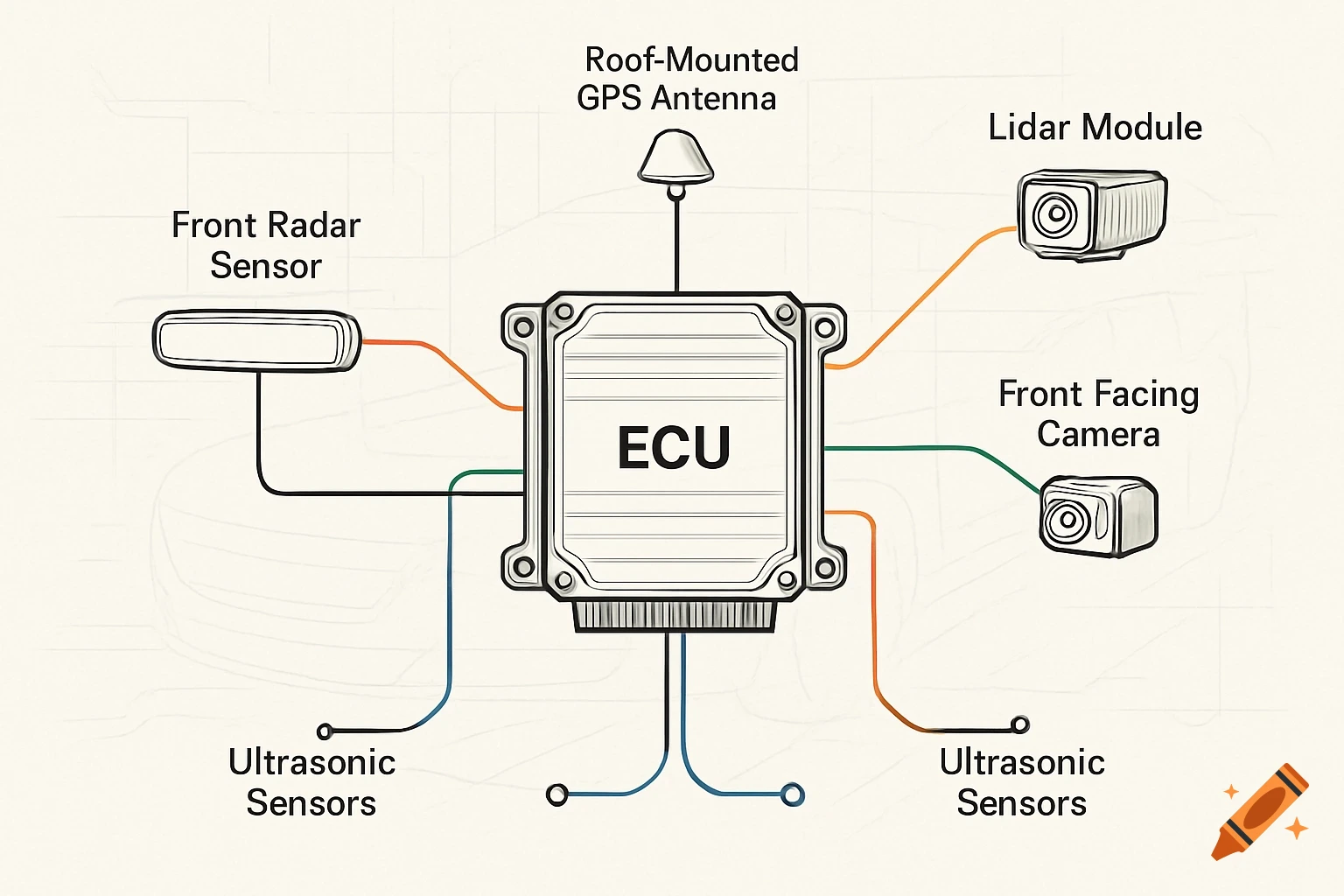
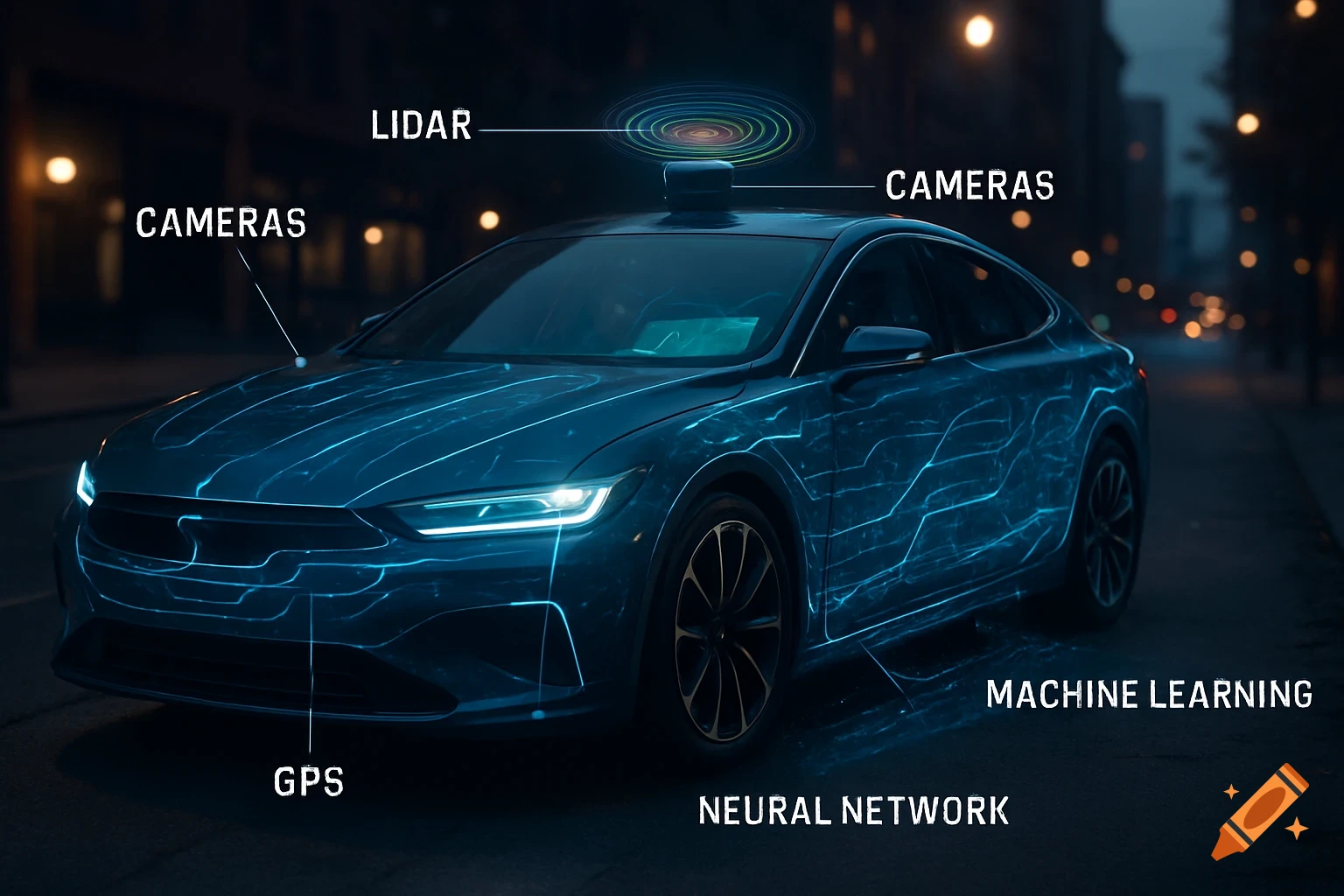
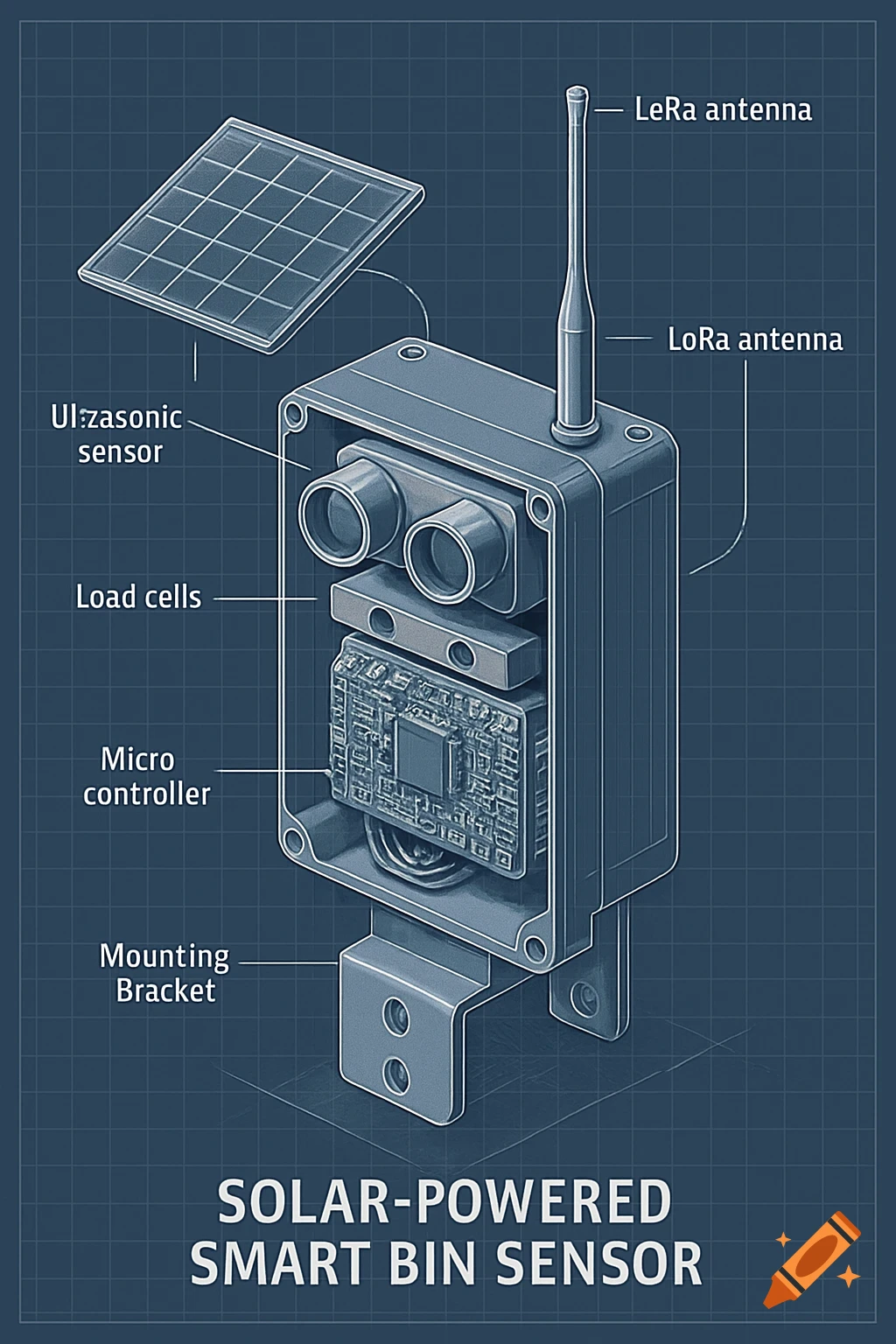
스마트 시각장애인 보조 모자 1. 핵심 아이디어 기존 센서로 주변 장애물, 사람, 자동차를 감지 감지된 정보를 음성/소리/진동으로 전달 GPS 모듈과 음성 내비게이션 추가 사용자가 목적지 주소를 음성으로 입력 자동으로 경로 계산 → 길 안내 음성 안내 지팡이 없이도 안전하고 목적지까지 안내 가능 2. 필요한 기술 센서 초음파 센서: 장애물 거리 측정 LiDAR 센서: 장애물 위치 및 거리 측정 카메라 + AI: 사람/자동차/신호등 인식 GPS 모듈: 위치 추적, 목적지 안내 마이크로컨트롤러 / 소형 컴퓨터: Raspberry Pi, Arduino, Jetson Nano 출력 장치 스피커: 음성 안내 + 경로 안내 진동 모터: 장애물 위치별 진동 패턴 전원 배터리 내장 (충전식, USB-C) 무게 250~350g 이하 유지 3. 설계 과정 (1) 센서 및 GPS 배치 전방, 좌우, 상단 360° 감지 GPS 모듈: 모자 상단 내부에 소형 모듈 배치 카메라: 전방 객체 인식 초음파 센서: 전방, 좌우 (2) 데이터 처리 마이크로컨트롤러에서 센서 데이터 통합 AI 모델 → 카메라 영상 분석, 객체 인식 GPS 데이터 → 실시간 위치 확인, 목적지 경로 계산 장애물 + 길 안내 통합 → 최적 경로 안내 (3) 사용자 피드백 장애물: 거리별 진동 강도 조절 특정 객체 음성 안내 (“앞에 자동차”, “왼쪽 사람”) GPS: 목적지 주소 음성 입력 (예: “서울역”) 경로 안내 음성 출력 (“좌회전 10미터 후 직진”) 음성과 진동 동시에 사용 → 직관적 안내 4. 제작 순서 회로 설계 센서, GPS, 배터리, 마이크로컨트롤러 연결 센서 프로그래밍 초음파 거리 측정 카메라 AI 객체 인식 GPS 내비게이션 기능 구현 GPS 좌표 → 지도 API (OpenStreetMap, Google Maps) 경로 계산 → 음성 안내 주소 음성 입력 → 텍스트 변환 → 좌표 변환 출력 설계 진동 모터와 스피커 동시 작동 경로 안내 음성 테스트 모자 구조 제작 센서, GPS, 배터리, 컨트롤러 모두 모자 내부 매립 센서 투명 커버, 카메라 숨김 테스트 및 보정 실제 길에서 GPS 경로 안내 테스트 장애물 감지 반응 속도, 진동 강도 조정 최적화 배터리 지속 시간 AI 모델 경량화 GPS 오차 최소화 5. 현실적 고려 사항 GPS 오차 ±5~10m → 복합 센서 보정 필요 AI와 GPS 통합 실시간 처리 → 소형 컴퓨터 필요 음성 안내 → 주변 소음 영향 최소화 위해 이어폰/스피커 선택 가능 모자 무게 → 하루 착용 가능 수준 유지 소프트웨어 업데이트 → 경로, AI 객체 인식 성능 개선 가능 💡 핵심 포인트 초음파/LiDAR → 장애물 거리 AI 카메라 → 객체 인식 GPS 모듈 → 목적지 경로 안내 진동/음성 → 사용자 직관적 안내 지팡이 없이 주변 환경과 목적지까지 안전하게 이동 가능 Mehr sehen
More images like this