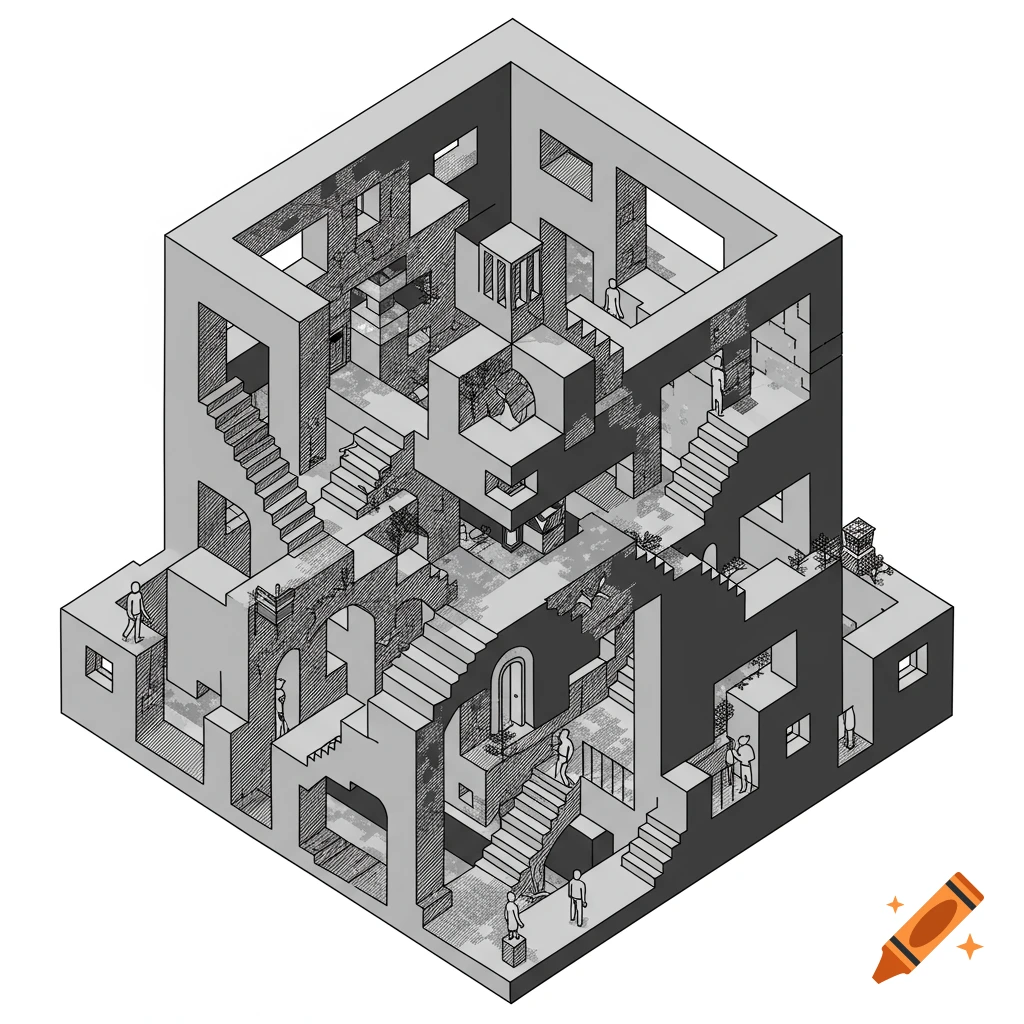
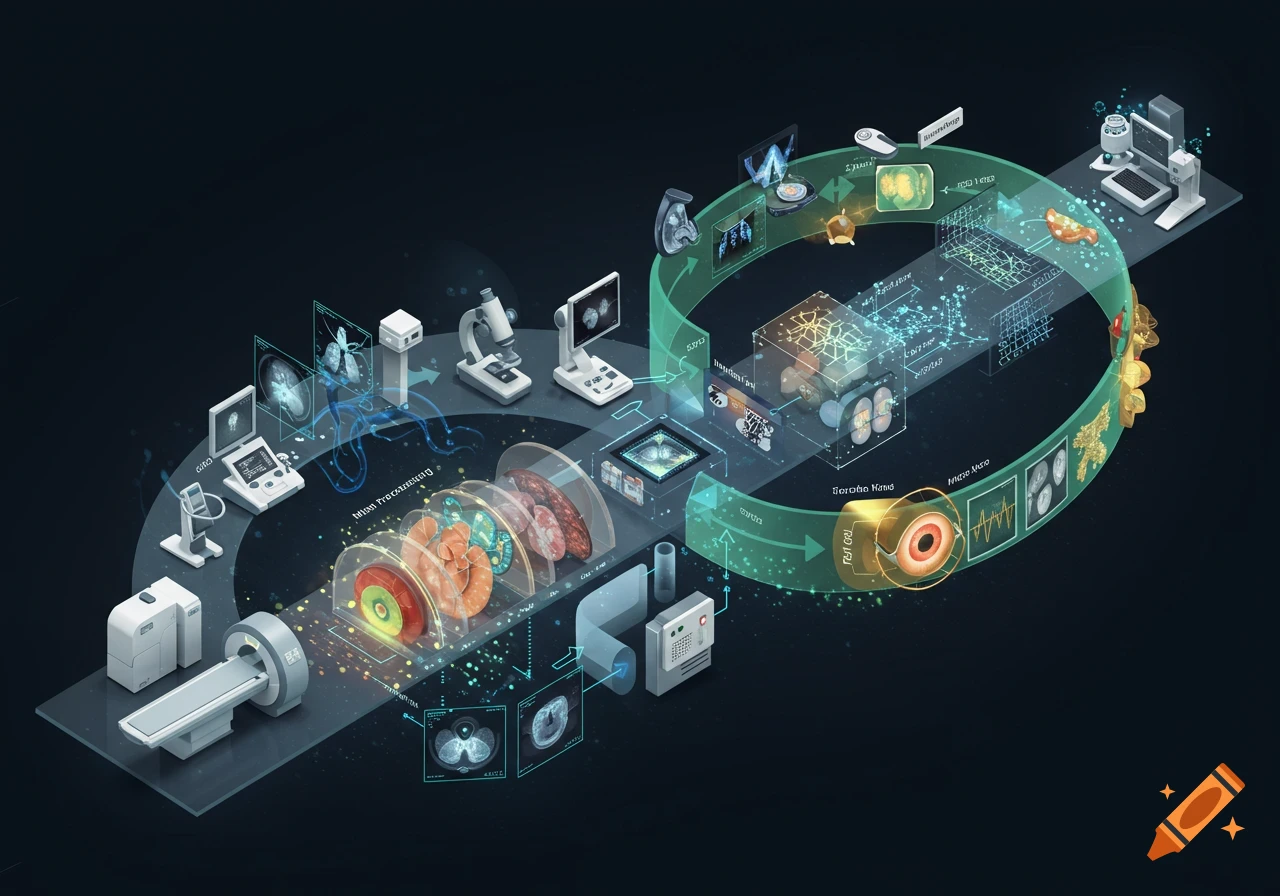
A technical diagram illustrating a multimodal LiDAR and image processing pipeline leading to a semantic BIM model, with steps for data input, structure extraction, unsupervised decomposition, and semantic prediction.

TEXTE POUR SCHÉMA - Pipeline multimodal LiDAR + Images vers BIM sémantique ENTRÉES DU PIPELINE text ┌─ Données LiDAR : Nuage de points 3D coloré (scans co-registrés) └─ Données Images : Photographies panoramiques/multi-vues + poses connues ÉTAPE 1 : PRÉTRAITEMENT & STRUCTURES SIMPLES text Objectif : Extraire les grandes structures géométriques ├─ Détection des plans dominants (RANSAC) │ └─ Sols, plafonds, murs │ └─ Paramétrisation directe └─ Stockage comme primitives mathématiques + intégration au modèle → Résultat : Nuage de points simplifié (objets complexes restants) ÉTAPE 2 : DÉCOMPOSITION NON SUPERVISÉE text Objectif : Grouper les points résiduels en candidats objets ├─ Clustering (DBSCAN / HDBSCAN) │ └─ Multi-échelle + prise en compte densité variable │ ├─ Espace de clustering enrichi │ └─ Coordonnées + normales + courbure + couleurs │ └─ Annotation des clusters └─ Boîtes englobantes (AABB, PCA) + comptage points ÉTAPE 3 : SEGMENTATION 3D PAR APPRENTISSAGE text Objectif : Prédire sémantique et instances directement sur points 3D ├─ Réseaux sur nuages de points (PointNet++, KPConv) │ ├─ Entrées : XYZ + normales + intensité + RVB │ └─ Sorties : ├─ Probabilités par point (classe sémantique) └─ Embeddings d'instances ÉTAPE 4 : SEGMENTATION D'IMAGES & PROJECTION 3D text Objectif : Exploiter les images pour guider la segmentation 3D ├─ Segmentation d'images (Segment Anything, etc.) │ └─ Masques sémantiques et d'instances 2D │ └─ Projection 2D → 3D └─ Votes accumulés par Mehr sehen
More images like this